
ACFM was originally developed by a group of brilliant researchers and engineers at the University College of London in the early 1990’s to tackle a common problem that the oil companies faced in their offshore assets: fatigue cracking failures.

In subsequent years, the technology was tested and validated thanks to substantial investments from these companies, proving its worth and unique capabilities. Specifications and approvals from the major industry’s regulatory bodies followed, making ACFM a renowned technique in the offshore world.
ACFM technology is applicable for several other underwater applications such as ship hull, drive shaft and propellers, wind tower foundations, bridge foundation monopiles, and FPSO's to name just a few.


.jpg?width=194&name=Windmills_D1-D4_(Thornton_Bank).jpg)
In the past few years, the latest generation of true ACFM was born. The strong physics and mathematical legacy of the technology remains, now driven by modern and state-of-the-art electronics and software. The next level electronics enable significant improvements in packaging, scanning speeds, and sensitivity, reaching up to 10 times scanning speeds and twice the sensitivity, further boosting the already excellent ACFM Probability of Detection, or PoD.
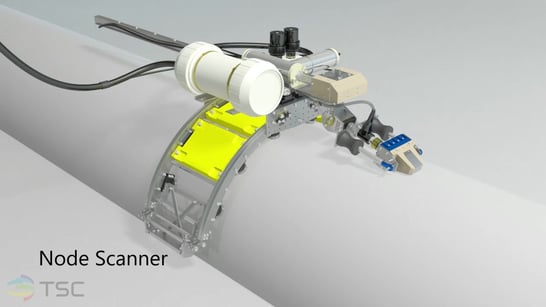
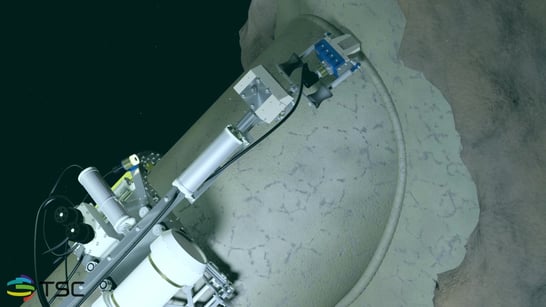
Underwater deployment of ACFM has stimulated substantial development in robotics. But, delivering a reliable inspection underwater with robots presents quite a challenge. As an example, following complex scan paths along nodal joints and other deep underwater structures is a colossal challenge which requires long term development.
Other considerations such as human health and safety also justify the trends towards diverless operations, yet despite these justified trending shifts towards ROV/robotic deployment, roughly 80% of underwater inspections today remain diver deployed.

In fact, most applications in shallower waters using ‘’air divers’’ for inspection is, by some margins, the cheapest option. On top of that, unsurpassed human dexterity and nimbleness of diver deployment makes inspection both efficient and well suited for difficult access regions and complex geometries.

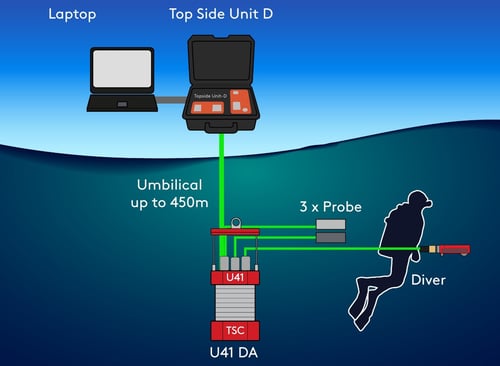
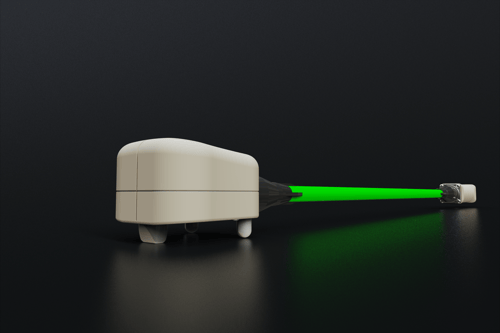
Eddyfi Technologies’ line of true ACFM products serve diver deployment very well. The U41D and U41DA instruments carry the ACFM legacy into the modern era with a complete range of SENSU® 2 underwater probes and a top-of-the-line diver array probe. The system is good for inspections down to 300 meters (1,000 feet) underwater.
For an even simpler and cheaper underwater deployment, the same range of underwater SENSU 2 probes can connect to a topside Amigo® 2 ACFM instrument through 50-meter, or 160-foot, cables.

For subsea inspections via diver or ROV deployed ACFM, the fact of the matter is they make a perfect team. The complementarity of the solutions offered by Eddyfi Technologies allow for maximum coverage for both inshore and offshore sectors alike. When considering options for the inspection of bridge foundations, harbors, dams and reservoirs, vessels, offshore structures and beyond, you need to think U41 and Amigo 2; the main classification societies that issue guidelines on UWILD inspection, maintenance, and certification approves both the U41 and Amigo 2 instruments to conduct ACFM inspections.
Contact our team of true ACFM experts to discuss your next inspection campaign and stay Beyond Current!
From subsea to ship decks, Eddyfi Technologies offers a range of solutions to suit inspection requirements. Check out this white paper offering the Pulsed Eddy Current, or PEC, solution for hidden corrosion in ship deck plates. |
|
