All ships must undergo periodic mandatory inspections according to their class. These inspections aim at assessing the condition of the ship and assessing damage to plan repairs. In many cases, ultrasonic testing of the hull thickness from the inside of the ship provides an accurate assessment of the hull plate’s remaining thickness. The inspection identifies areas of concern, and when required by class, repairs are performed.
When accessing the hull from inside the ship is not possible, measurements can be performed from the outside. This process may involve working at heights, endangering workers’ safety. Alternatively, for the submerged part of the hull, UT can be deployed using Remotely Operated Vehicles (ROV) underwater. In both cases, single-channel UT probes are used. Typically, a coarse grid spacing is used, 150 millimeters by 150 millimeters (6 inches by 6 inches), for example. The coarse grid may leave smaller areas of critically severe corrosion unnoticed.
Navigating the Challenge of Corrosion on Ship Hulls
Corrosion is often found above longitudinal stiffeners in aging ships. With time, the drain holes designed to let the water flow down to an area where it can be collected tend to get clogged with debris. With the passive protection from the drain hole compromised, water gets trapped above the longitudinal stiffeners which creates a corrosion prone area. Corrosion grows just above the stiffener, slowly weakening the hull plates. This damage mechanism typically spans only a few centimeters above the structural members, making it too small to ensure detection by a large UT grid from outside the hull. Moreover, external surface conditions of the hull, such as coating detachment from the steel hull or highly attenuating coatings, can make ultrasonic measurements impossible without first removing the coating.

Figure 1: Internal Corrosion in Bilge Area of an Aging Ship
The Pulsed Eddy Current Solution for Hull Inspection
Drawing on Eddyfi Technologies' expertise with the PEC ship deck inspection solution, which bears similarities to hull inspections, along with trials conducted with national navies focusing on actual hull structures and typical damage mechanisms, the foundation for an optimal hull inspection solution was laid.
More specifically; results obtained from scanning hulls with the standard PECA-6CH-MED probe (Fig. 2), designed for wide coverage, rapid scanning, and thick coatings/insulation, as well as the smaller but more sensitive PECA-HR-SM (Fig. 2), played a crucial role in developing a probe that strikes the perfect balance between speed and sensitivity for hull inspections.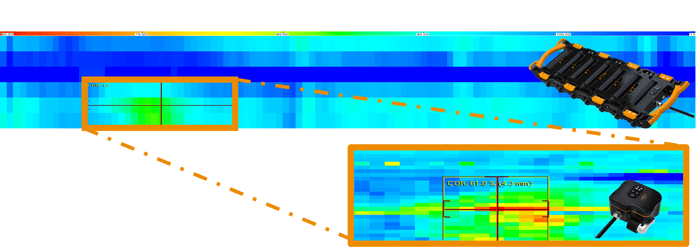
Figure 2: Corrosion Mapping on Ship Hulls using Standard PECA Probes
Building upon these foundations and in collaboration with a NATO country navy, Eddyfi Technologies engineered a probe optimized to deliver the ideal blend of productivity and accuracy. The 311-millimeter (12.25-inch) wide PECA probe (Fig. 3) is waterproof up to 30 meters (99 feet) and can be swiftly configured for manual scans or integration with magnetic crawlers (Fig. 3). More details about that later… This solution boasts a resolution of 45 millimeters by 22.5 millimeters (1.75 inches by 0.875 inches), significantly finer than a traditional UTM grid, ensuring comprehensive surface mapping even in the most challenging conditions.


Figure 3: PECA Probe for Ship Hull Inspections equipped with handles for manual operation (Left) and for crawler deployment (Right)
Practical examples illustrate the effectiveness of the PEC hull inspection solution in detecting corrosion, which tends to develop preferentially from the inside, just above the longitudinal framing of the ship. Figure 4 demonstrates clear corrosion detection, notwithstanding the influence of structural members on the PEC signals. Corroded areas are highlighted, ranging from minor corrosion in green to yellow, and then red for more severe corrosion, contrasting with non-corroded areas shown in blue.
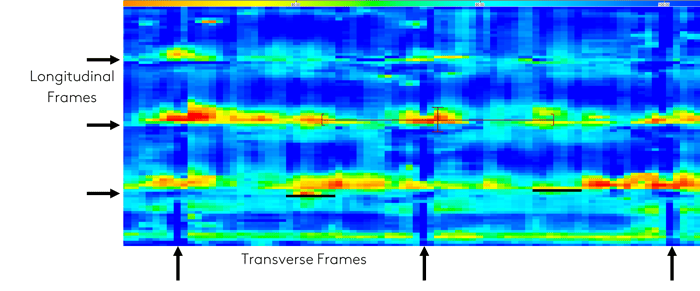
Figure 4: Corrosion Mapping with PEC
Even when scanning relatively sound hulls, PEC data proves valuable. It clearly maps the structure of the ship, making it ideal for creating a digital twin during the construction of a new vessel. This digital twin can then be compared to data collected throughout the ship's life, facilitating historical data comparisons. Figure 5 illustrates the clear identification of structural components and showcases the effectiveness of PEC advanced analysis tools, available in Lyft® CPN, in discriminating areas of interest affected by wall loss (highlighted by the red rectangle in Fig. 5) from those influencing PEC signals due to material property variations or the influence of structural.
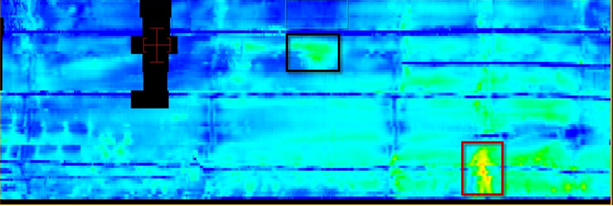
Figure 5: PEC array data illustrates the mapping of structural elements on a predominantly intact ship hull, with true wall loss highlighted within the red rectangle and material property variations delineated within the black rectangle.
Robotic Deployment of PEC
With an optimized NDT modality on hand, the next inevitable step is to integrate it with magnetic robotic crawlers able to carry out the inspection remotely, without any surface preparation or work at heights endangering personnel. Extensive testing ruled out any interference between the PEC electromagnetic sensors and the powerful magnets and motors in our standard robotic crawler.

Figure 6: VersaTrax M-Series Crawlers Can Climb Vertical Surfaces
With a depth rating of 60 meters (200 feet), VersaTrax™ magnetic crawlers can perform an inspection underwater while the ship is not yet in a dry dock. Early assessment of the corrosion damage allows naval engineers to plan corrosion repairs long before the ship enters the shipyard, reducing unplanned corrosion repairs cost and refit schedule disruption.
With the new release of ICON™ 5 software and ICON SDK, the operating system allows users to incorporate more data and routine scripts into their inspection. With these new capabilities, operators can write their own code to have the inspection crawler operate in a specific manner or routine. The routines will allow the robot to perform precise inspections that produce reliable and repeatable data/results.
The future is looking bright for the marine and naval sectors keen on detecting corrosion early thanks to easily deployable and robust NDT enabled robotics. We invite you to contact our experts to discuss how our advanced solutions can keep you Beyond Current today!
Authors: Charles Tremblay, Jeff Abt