While Eddyfi Technologies is known for its wide range of small and agile inspection crawlers, we have also been creating industrial robotics capable of XY movements for a long time. Eddyfi Robotics developed a patented design that is increasingly being employed due to the inherent benefits afforded with an XY crawler versus our standard crawler robots or robots using a raster arm. This article shares some examples where our unique XY crawlers truly excel.
Benefits of an XY Crawler
The raster scanning motion is a very common concept in non-destructive testing. It is used in most mapping applications to make sure the surface is covered with sufficient overlap and accuracy. The most common approach to this is the use a raster arm on a standard crawler. The XY crawler provides the same advantages but pushes the limit of what is possible to accomplish.
-
Better control over your position which is great for mapping applications. By avoiding skid steering and unnecessary motion, the precision of the position is greatly enhanced. Any automation is also much simpler and efficient.
-
The inspection plan and sequence become child’s play when using an XY crawler. No tether management and quick repositioning are among the benefits.
-
Compared to standard raster arms, the XY crawler is capable of much more payload. This opens the doors to some advanced NDT techniques and new applications that used to be impossible.
To learn more about our robotic systems and remote visual inspection software, visit the Eddyfi Academy.
XY Crawler for Storage Tank Inspection
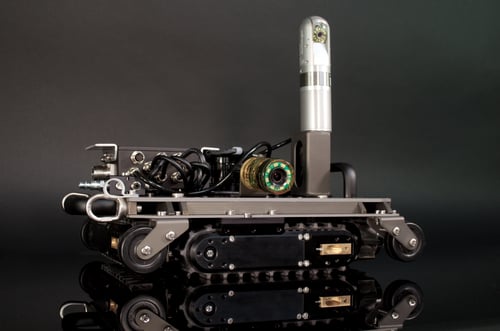
One of the first XY crawlers designed and manufactured by Eddyfi Technologies was for Washington River Protection Solutions, or WRPS, for the tank inspection at The Hanford Site – a decommissioned nuclear production complex. In this case, the tight environment and capacity to position the inspection crawler were key reasons to use an XY crawler as the lack of space would make it impossible for a tethered crawler to rotate 180 degrees. The tether would get stuck between the inner and outer shell. The capacity to position and deploy a small robot in a tight air slot would have been extremely difficult for an operator to do without the lateral motion of an XY crawler.
The US Office of Environmental Management published this article on the technology for inspecting the bottom of the Hanford double-shell tanks. If white papers are more your thing, check out Marsupial Miniature Robotic Crawler System for Camera and Sensor Deployment in Nuclear Waste Double Shell Tank Refractory Air Slots. This project successfully accomplished two “firsts”. Not only did it give engineers a comprehensive look at the underside of the primary double-shell tank (DST) for the first time, but it also represents the first-ever confined space deployment of a truly “marsupial” robotic system. According to WRPS engineer, Jason Gunter, “Developing and implementing tools to visually inspect the underbelly of primary tanks will help us achieve our ultimate goal to support extended service lives of the double-shell tanks.”
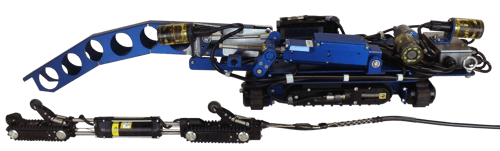
Coke Drum Inspection with ECA Probe
Coke drum inspection is another application where an XY crawler is a key tool. Due to the cladding condition on the inside and the type of defects we are looking for when inspecting coke drums, the most appropriate technique would be eddy current array (ECA). Due to the form, size, and weight of these type of complex probes, standard raster arms are not well suited for this. This is where a crawler capable of XY motion will outshine any alternatives. By using the whole crawler to perform the lateral motion, you can have a much higher payload capacity, you can use larger offset and probes with more coverage. Moreover, the XY crawler can accommodate bulges, surface deformations, and curvature with ease which is not always the case with a rigid raster arm. This is also ideal for inspecting similar assets or critical components.

Ship Hull Inspection with PEC and ACFM
Similar to the ECA probe used for coke drum inspection, pulsed eddy current (PEC) probes can be quite heavier than ultrasonic testing (UT) probes and are typically not suited for a raster arm. An XY crawler can deploy large covering PEC probes to quickly screen ship hulls and assess the hull condition. The other good news is that Eddyfi Technologies also offers depth rated solutions if dry docking is not an option.
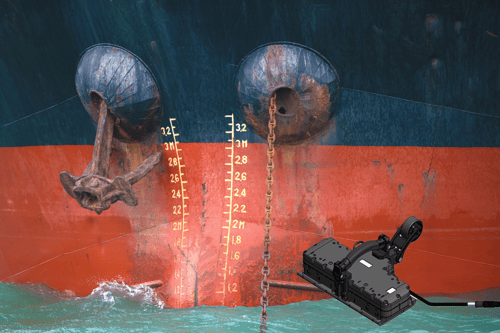
The XY crawler can also carry alternating current field measurement, or ACFM®, probe packages as a complementary inspection tool to cover the weld joining the plates. Add this to a dedicated and customized automation routine and you now have yourself a complete, repeatable, and efficient inspection solution. Check out the online store to build and price out your custom crawler.
These are just a few of the many applications XY crawlers have been used in the past and are still being used today. Tooling, cleaning, and large-scale inspection are right in the wheelhouse of the XY crawler.
Flexible yet rugged platforms capable of many different things, the only limit for Eddyfi Technologies XY crawlers is our imagination. Bring us your remote inspection, maintenance, and tooling challenge and let’s see exactly where these XY crawlers can go – contact our team today!
Author: Christophe Bordeleau