.jpg)
In nuclear remediation, sampling robots are essential for remote operation in confined and hazardous environments. These tooling robots are crucial in the heel characterization process, which involves analyzing the residual sludge or sediment left at the bottom of tanks that have stored radioactive waste. The sludge or sediment, known as “heel”, is a mixture of solid particles and liquid. By using specialized equipment such as remotely operated vehicles, samples of the heel can be collected and analyzed for physical, chemical, and radiological properties. This information is used to develop a safe and effective plan for removing and disposing of the waste. The use of sampling robots helps to minimize the risk of human exposure to radiation and hazardous materials while increasing the efficiency and accuracy of the remediation process.
Eddyfi Technologies' robust robotic solutions have been employed by the US DOE for nuclear remediation operations in the past, so it was natural for SRMC to approach the company for a fleet of robotic crawlers to safely enable heel characterization. Take a walk down memory lane of Eddyfi Technologies’ tooling robots for nuclear remediation here and here.
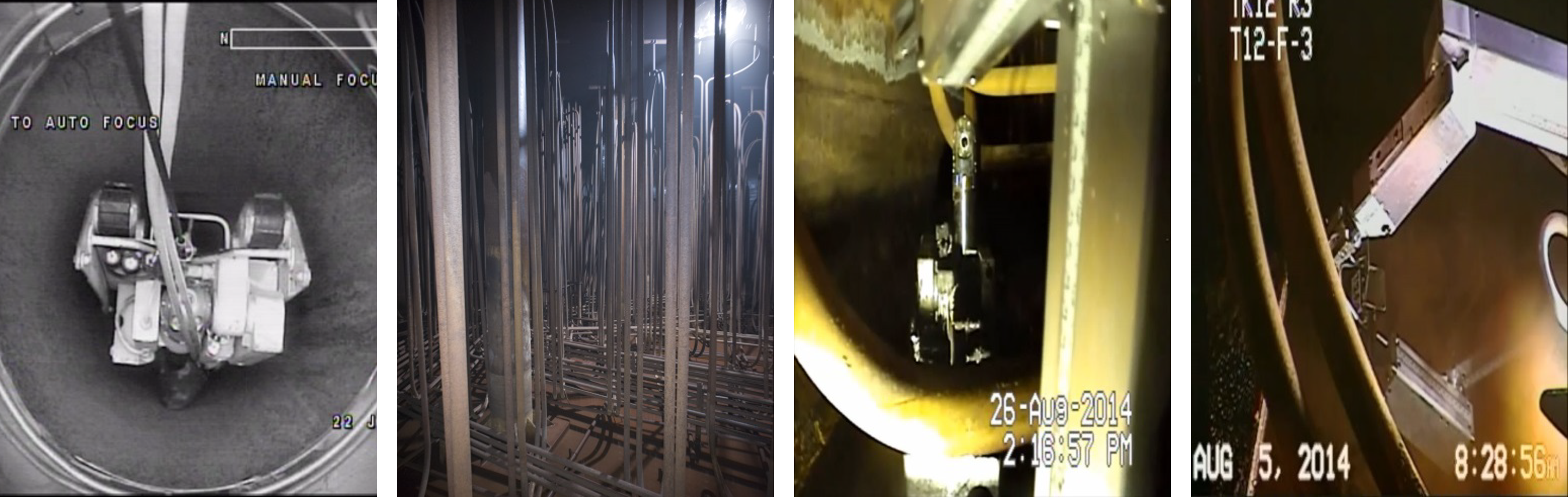
Left to right: Crawler insertion with limited access, internal obstruction with cooling coils before sampling/grouting, multiple crawler operation with two-crawler sample handoff, and sampling through water or wet sampling. Images courtesy of Savannah River Site (SRS).
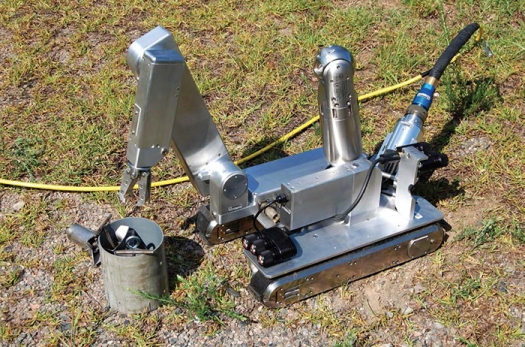
The next-generation solution also consists of four main components that make up a system: the vehicle, a tether with tether management (discover the benefits of a tethered inspection robot here), a controller that can be connected to either 120 VAC or 240 VAC power outlets, and ICON™ software which is configurable and used for the control and operation of the system. It includes customizable control screens allowing vehicle operations and individual device control including tracks, lights, cameras, actuators, and manipulator joints; display and recording of sensor data; recording video and tagging areas of interest with overlay onto recorded video. The recorded data can be easily exported to USB drives for post-processing.
New features for this VersaTrax™ OnSpec custom solution include a plugin providing inverse kinematics control, allowing the multiple degree of freedom manipulator to be controlled via handheld controller or the control screens with ICON. The four-degree of freedom actuator includes rotational degree of freedom for manipulation without having to turn the crawler, a two-function end-effector manipulator with interchangeable jaws, laser lines affixed to the manipulator to assist with sizing estimation and distance judgment, two high-intensity adjustable intensity lights, a high-definition Spectrum™ 120 camera, and two auxiliary standard definition cameras. Pretty handy if you ask us!
 How to Safely Assess Suspect Packages at Sea
How to Safely Assess Suspect Packages at Sea
Purpose built, the sampling crawler includes two stainless steel crawler tracks with a minimal feature undercarriage for operating in tank sludge, topside components that are aluminum to reduce crawler weight, and a spring relief mechanism for the tether and vehicle connection. Moreover, the custom robotic crawlers have been designed to fit through a 582-millimeter (23-inch) inner diameter pipe as they are lowered vertically via crane into waste tanks through 582-mm(23-in) diameter risers. These confined space entry (CSE) robots check that requirement off the list.
Eddyfi Technologies' robotic crawlers play an imperative role for Savannah River Mission Completion, providing a safe and efficient way to remotely operate in confined and hazardous environments. With its reputation for reliability, quality, and versatility, Eddyfi Technologies accepts the challenge requiring specialized robotic solutions for remote operations in even the most inhospitable industrial environments. So, if you're facing a challenge in this field, why not contact our team of friendly robotics experts to discuss your requirements today? Eddyfi Technologies is making the world a safer place, one robot at a time.